机器人扫雷程序与仿真实现
1、程序分为两个主要部分,主程序与子程序(找地雷)。编辑界面分,流程编辑与
代码编辑。

2、点击找地雷打开设置窗口,点击编辑,可以打开子程序部分。


3、先来看主程序部分的流程参数设置。
察看机器人眼睛的设置。

4、接下来是对参数付初始值。



5、下面是循环的控制设置。

6、条件判断的设置如下。


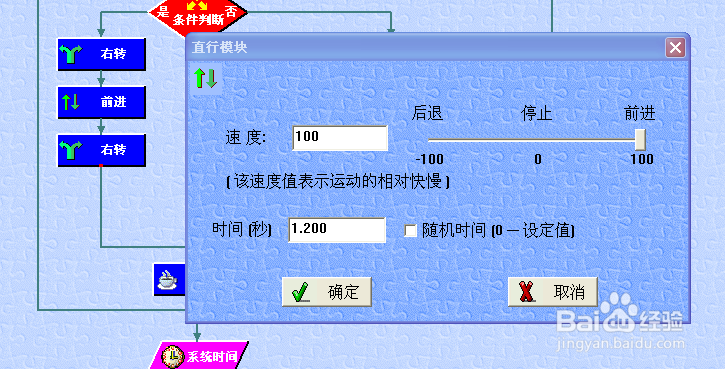
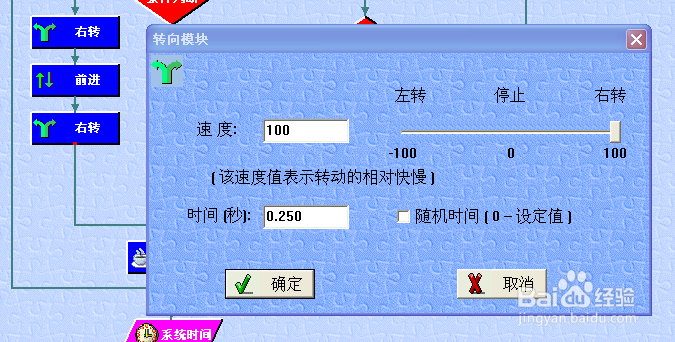
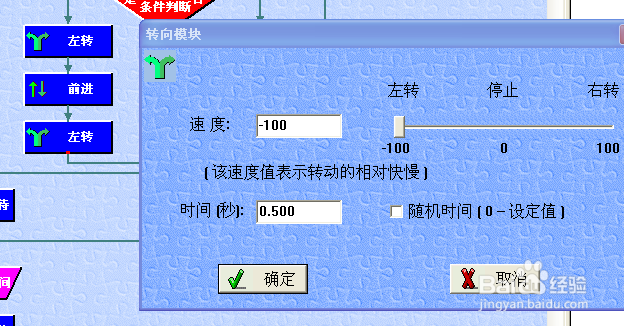
7、由方向模块对电机的控制,完成机器人的实际行走。
8、延时用于等待下一个动作的到来,或持续某个动作。

9、显示模块用于简单显示机器人状态。

10、歌曲子程序用于播放声音。

11、歌曲子程序由发音模块组成乐曲。具体发音设置如下。


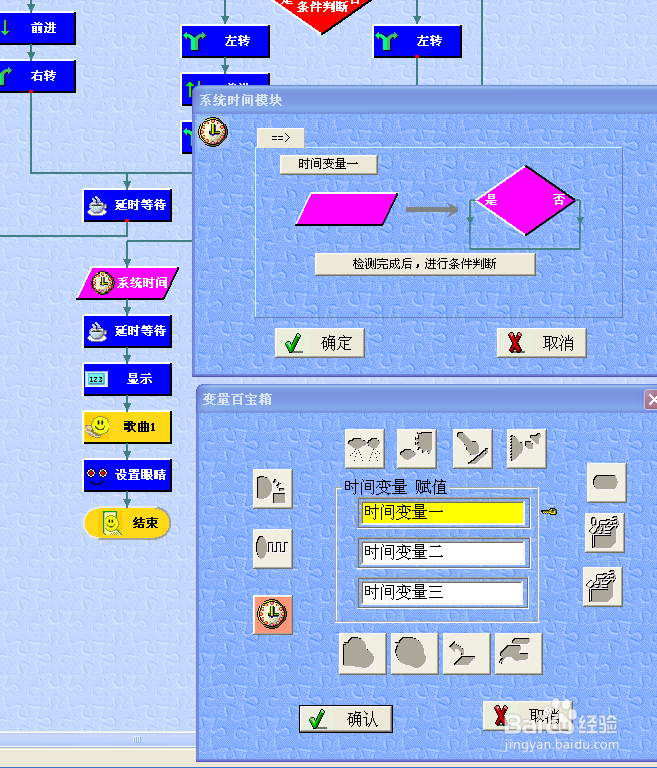
12、系统时间模块分带和不带判断两种方式。
13、地面检测添加方法如下。
1、添加模块。
2、打开属性编辑。
3、打开检测后进行条件判断。


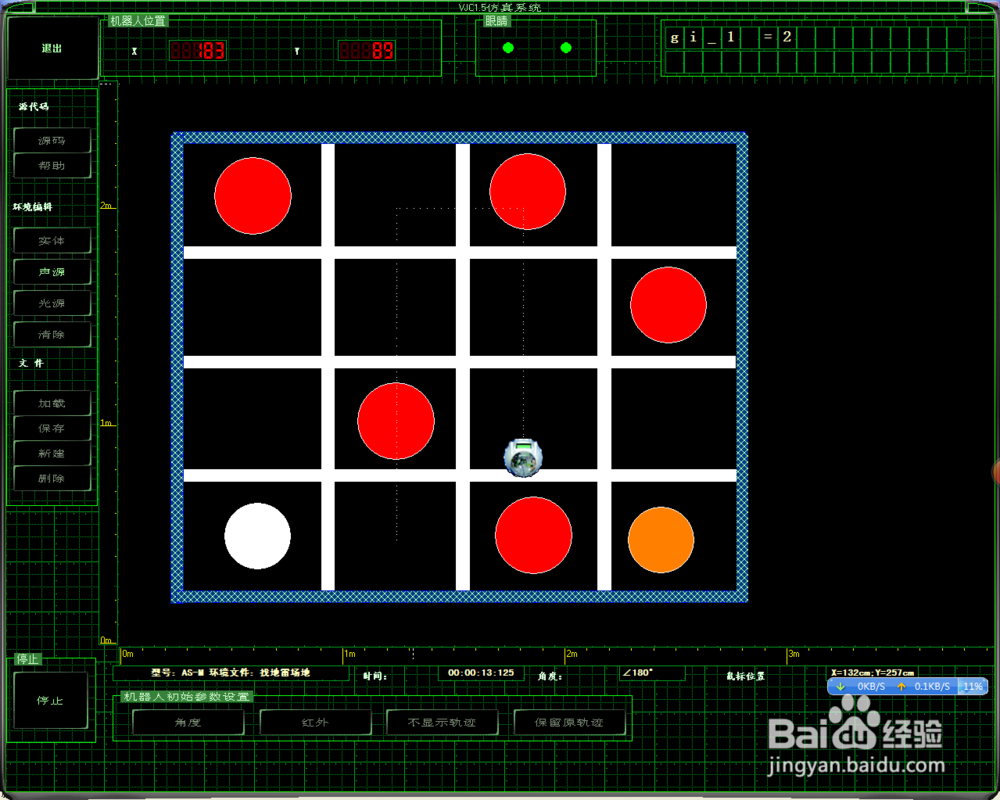
14、单击图标进入仿真界面。

15、载入环境文件。
点击开始,鼠标图标变为机器人,将机器人放入场地,就可以自动开始执行程序仿真运行。